CAM3R: Camera-Agnostic Model for 3D Reconstruction
作者:Namitha Guruprasad, Abhay Yadav, Cheng Peng, Rama Chellappa
单位:Johns Hopkins Universit,University of Virginia
会议:2026 Arxiv
链接:https://nam1410.github.io/cam3r/

研究动机
1.现有的模型在透视图像数据集上训练,局限在针孔相机几何,在大视场角无矫正图像上几何退化严重
2.直接对畸变图像进行矫正会导致图像被严重拉伸,丢弃掉曲率较高的边缘区域
核心方法

1.Ray Module
参考UniK3D预测球谐函数表示相机光线
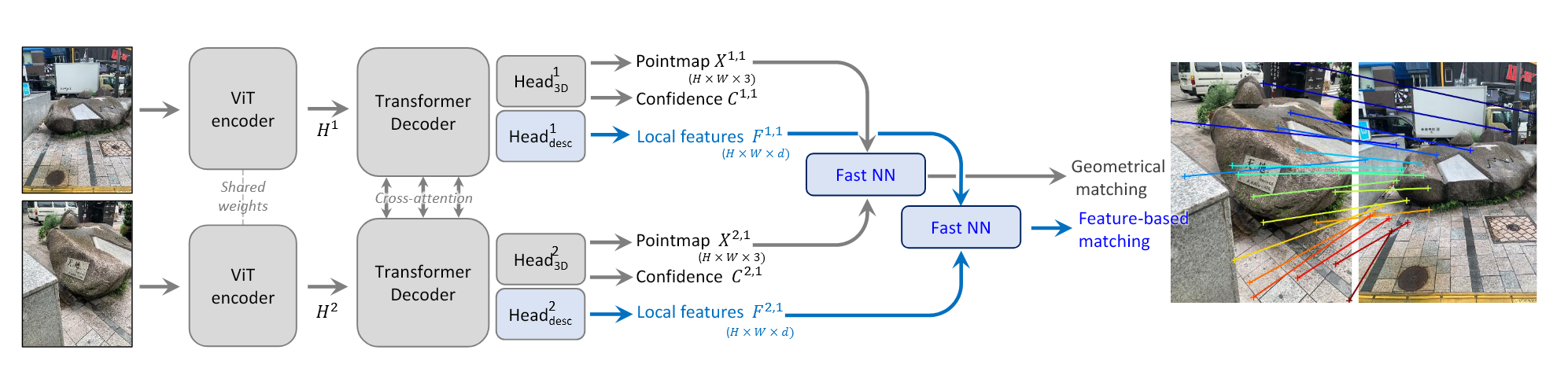
2.Cross-view Module
参考Dust3R的结构形式进行信息交互与特征提取,最后用DPT head回归radial distance和对应的confidence map。额外采用一个relative pose模型回归图二到图一的位姿变换。
3.损失函数
非对称角度损失:
回归损失:
计算归一化因子消除尺度模糊:
相对位姿损失:
用预测的点图与GT之间的比值对平移进行缩放
4.Ray-aware全局对齐
Scene-Graph Pruning:首先用模型对所有图像对进行推理,然后过滤几何不一致的图像对。评估标准包括对称位姿一致性:一个图像对分别互为参考帧时位姿的一致性,只有在数学上可逆的图像对被保留。几何重叠验证:几何重叠不足的图像对会被丢弃。

全局对齐的时候,对于每一张图像,首先根据其所有图像对计算出来的射线方向进行置信度加权计算。然后,选择不同图像中共同的射线方向,利用中位数对齐radial distances,最后按照置信度加权。
优化目标为:
数据集
2D3DS and 360Loc: 全景图像数据集,合成了对应的鱼眼与透视视角
ADT:鱼眼数据集,生成了对应的透视图像
MegaDepth:透视数据集
CO3Dv2:用于评估,生成了鱼眼图像
算力
4张H200
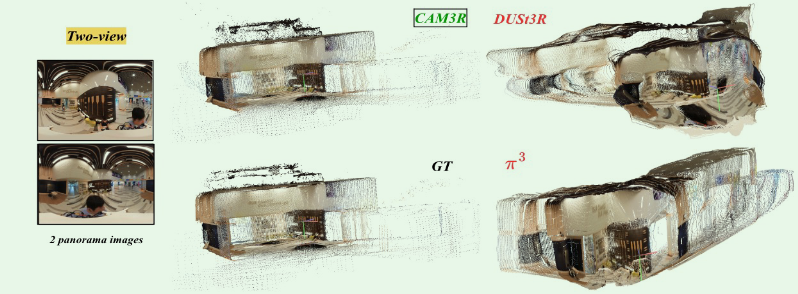
实验结果





优势与不足
优势
1.实现了多相机模型的前馈式三维重建
2.设计了多视角的匹配算法,使得两视图的模型输出能够进行全局的一致性优化
不足
1.在面向多视角时需要进行后处理,相比于纯前馈式的模型应用成本更高
记忆点
1.先用相同的相机模型图像对进行训练,然后再用异构图像对进行训练
2.利用现有数据集进行数据的合成与拓展
 微信
微信 支付宝
支付宝